
"Learning Real-World Action-Video Dynamics with Heterogeneous Masked Autoregression"
Below podcast on this paper is generated with Google's Illuminate.

https://arxiv.org/abs/2502.04296
The challenge lies in creating versatile and efficient robot world models that can operate across different robots and tasks in real-time. Current approaches struggle with the diversity of robot setups and are often computationally expensive.
This paper introduces Heterogeneous Masked Autoregression (HMA) to address this by learning action-video dynamics from varied robotic data using masked autoregression. This method aims for both high-quality video generation and real-time performance.
-----
📌 HMA's modular architecture with separate stems and heads efficiently addresses action heterogeneity. This allows for a single trunk network to generalize across diverse robot embodiments by adapting only input and output layers.
📌 Masked autoregression in HMA offers a crucial speed advantage over full sequence diffusion models. This enables real-time robotic simulation (15x faster than IRASim) making interactive world models feasible.
📌 Pre-training on large heterogeneous datasets is key to HMA's success. It allows for effective transfer learning and robust performance even when fine-tuning on limited task-specific data.
----------
Methods Explored in this Paper 🔧:
→ Introduces Heterogeneous Masked Autoregression (HMA). HMA is a framework designed to model action-video dynamics.
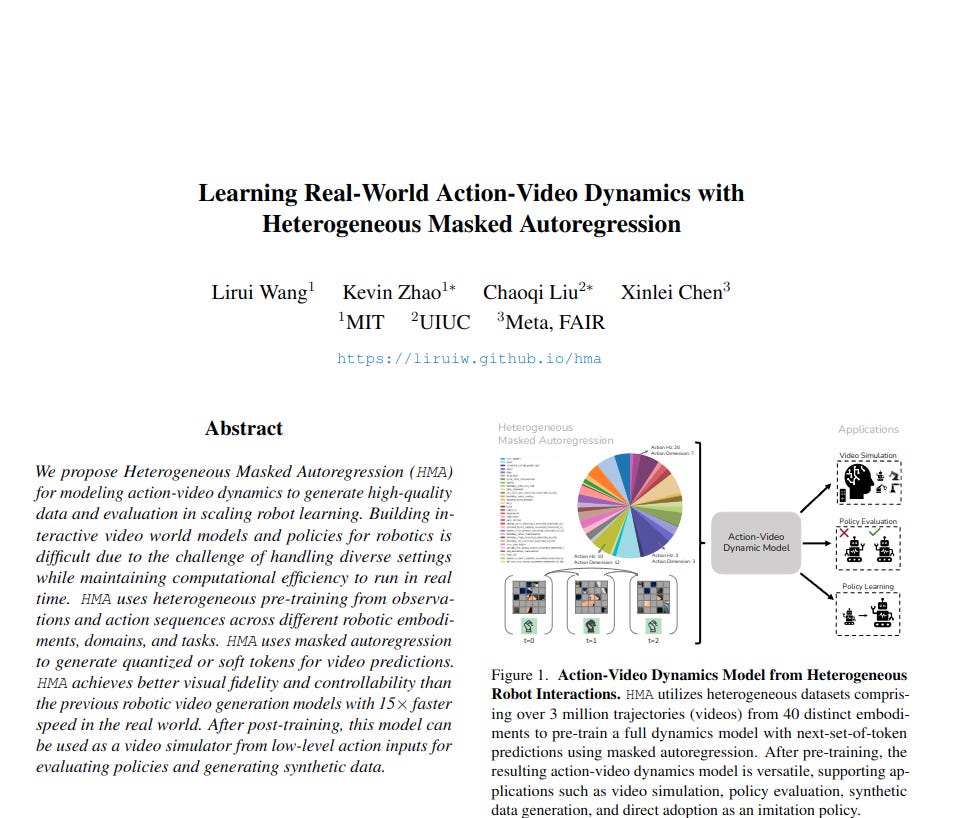
→ HMA is pre-trained on a large and diverse dataset of over 3 million video trajectories from 40 different robotic systems. This pre-training uses heterogeneous data from various embodiments, tasks, and domains.
→ The core of HMA is masked autoregression. This technique is used to predict future video frames and robot actions based on past observations and actions.
→ HMA offers two variations for video generation: a discrete version using vector-quantized tokens for speed and a continuous version using soft tokens to maintain visual fidelity.
→ The model architecture is modular, featuring a shared core transformer network called "trunk". It also includes specific "stem" and "head" modules for different robot embodiments to handle action heterogeneity.
→ To effectively incorporate action information, HMA uses modulation techniques within its transformer architecture. This allows the model to condition video generation on different action inputs.
-----
Key Insights 💡:
→ HMA effectively handles the challenge of action heterogeneity in robotics. It can process and learn from data from robots with different action spaces and frequencies.
→ Masked autoregression is shown to be an efficient method for learning action-video dynamics. It provides a balance between generation quality and the speed needed for real-time applications.
→ The pre-trained HMA model is versatile. It can be used for various robotics tasks including video simulation, policy evaluation, generating synthetic training data, and even acting as an imitation policy itself.
→ Scaling the HMA model with more diverse data, larger datasets, and increased model size leads to improved performance in terms of both visual quality and action controllability.
→ HMA achieves real-time interactive video simulation. This is a significant advancement for creating responsive and practical robot world models.
-----
Results 📊:
→ HMA achieves a 15× speed increase in inference compared to IRASim, a previous state-of-the-art model, demonstrating its real-time capability.
→ On the Language Table benchmark, HMA shows improved visual fidelity with a PSNR of 28.19 compared to IRASim's 25.41.
→ HMA also demonstrates better controllability with a ∆PSNR of 6.06 versus 5.78 for IRASim on the same benchmark.
→ Policy evaluation using HMA simulator shows a high positive correlation (Pearson ratio 0.95) with evaluations done using a ground truth simulator, validating HMA's use as a reliable simulator.
→ Training policies with synthetic data generated by HMA improves policy performance. Using 90% synthetic data achieves performance comparable to using 100% real data.